CTRLIM è un limitatore di momento per gru e sollevatori telescopici. Il limitatore di momento ferma la macchina quando il momento del braccio è superiore ad un valore impostato.

Il momento si esprime in Newton * metro (Nm) e misura l'effetto di rotazione causato da una forza su un corpo. Immaginiamo un carico posto in cima al braccio telescopico di un sollevatore: quando il braccio è inclinato rispetto alla verticale, il peso ne causerebbe una rotazione verso il basso. Ovviamente il braccio oppone una forza opposta, in modo da mantenere il peso nella sua posizione o, anche, per sollevarlo. Quando il momento è superiore al massimo consentito dal braccio o dalla gru nel suo complesso, la gru potrebbe ribaltarsi o il braccio potrebbe deformarsi. Per questo motivo si installano dei limitatori di momento: sono dispositivi di sicurezza che evitano le situazioni negative appena esposte.
Il limitatore di momento CTRLIM calcola il momento a partire da:
- un sensore di inclinazione (angolo di inclinazione del braccio rispetto all'orizzonte);
- un trasduttore di lunghezza del braccio telescopico;
- un sensore di pressione sul cilindro di sollevamento del braccio.
Il limitatore di momento incrementa la sicurezza delle gru e dei sollevatori, in quanto ferma l'attrezzatura prima che il momento raggiunga il valore massimo.

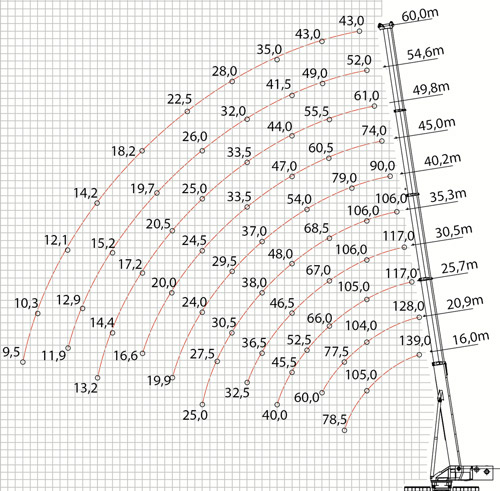
Quando la gru solleva un carico, questo può essere sicuro per certe inclinazioni e per certe lunghezze del braccio. Ad esempio, quanto maggiore è l'estensione del braccio, tanto maggiore è il momento, per cui il carico diventa più pericoloso. Quanto più il braccio è orientato orizzontalmente, tanto più il momento aumenta.
Limitatore di momento CTRLIM, il progetto
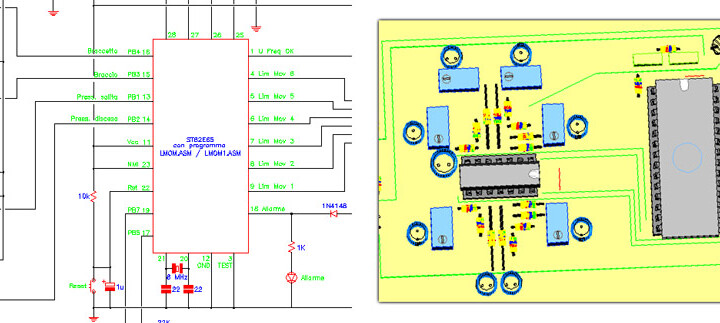
Scheda elettronica, progettazione dello schema elettrico e sbroglio del circuito stampato della mainboard, che ha le seguenti caratteristiche:
- microprocessore centrale;
- stadio di alimentazione lineare;
- porta RS232 per la comunicazione con il PC e la configurazione;
- N. 2 ingressi analogici per sensori di pressione (4-20mA);
- N. 1 ingresso analogico per sensore di angolo (0-5V);
- N. 1 ingresso analogico per sensore di lunghezza del braccio (0-5V);
- uscite digitali per comandare il blocco della gru;
- uscita digitale per segnale di allarme acustico e visivo;
- LED di stato.
Firmware del microprocessore: sviluppo di tutte le funzioni necessarie per misurare i vari parametri, sviluppo delle funzioni matematiche per le operazioni complesse, implementazione dei protocolli di comunicazione, programmazione delle funzionalità.
Linguaggi di programmazione: Assembler, GWbasic.
Inizio progetto: Maggio 1994. Stato attuale: fuori produzione.